EQUILIBRIUM OF MOMENTS
We consider the equilibrium of an object like a horizontal bar. In the lab it will be a meter stick. Equilibrium means that it does not have translation (motion in which all points on the body move with the same vector velocity) or rotation. We can define rotation by choosing any point on the body, calling that point the "axis", and considering rotation about that axis.
There may be several forces acting on the body, and each force acts at a certain point. In the diagram, F1 acts at point P1 and F2 acts at point P2; A is the axis.
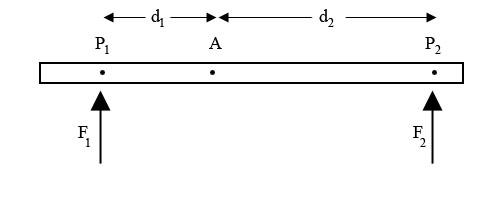
We consider only forces that act up or down. The distance from the point where the force acts to the axis is called the moment arm, d1 and d2 in the diagram. The product of the force times the moment arm is called the torque (also called the moment), and is represented by the Greek letter tau: t.
t = Fd
Torque also has a sign: It is positive (by convention) if it tends to rotate the object in a counter-clockwise direction around the axis. It is negative if it tends to rotate the object in a clockwise direction around the axis. In the diagram the torque due to F2 is positive and the torque due to F1 is negative. The forces themselves have signs. We may take forces positive if directed up, and negative down.
The conditions for equilibrium are then stated simply: The sum of all forces must be zero, and the sum of all torques must be zero.
Sti = 0
SFi = 0
Here "i" is a label that varies over all the forces, i = 1, 2, 3, etc.
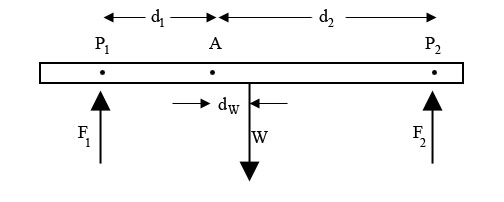
One particular force requires further consideration: the weight of the bar. The weight (force of earth's gravity) does not act at a point, but acts at all points along the object. However, for purposes of determining equilibrium, the weight can be considered to be concentrated at a single point, called the center of mass. Thus, a bar supported by two upward forces, and held in equilibrium, looks like the figure below.
Since the axis, for problem-solving purposes, can be chosen anywhere along the bar, it is convenient to choose it at the point where one of the forces acts. Then the moment arm for that force will be equal to zero, and so that force will not come into the torque equation. For example, we may choose the axis to be at the center of mass.
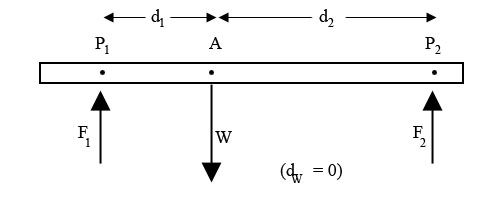
In this diagram, suppose F1 = 2.0 N, d1 = 0.4 m, d2 = 0.5 m, and F2 is unknown. W is also not known, but dW = 0, and so the torque due to the weight, tW = 0. The torque equation thus becomes,
t1 + t2 = 0.
t1 = -F1d1 = -2.0 X 0.4 = -0.8,
t2 = +F2d2 = F2 X 0.5, and so
0.5F2 - 0.8 = 0,
F2 = 1.6 N.
Note that the weight is not given, or determined, in the discussion above. To find the weight we have to use the second equilibrium condition, that the sum of all forces = 0. Since F1 and F2 are up, and W is down, we have
2.0 + 1.6 - W = 0, or
W = 3.6 N.
For many objects with simple geometrical shapes one can determine the center of mass by symmetry. For example, the center of mass of a uniform bar is at its geometrical center. For the meter stick it is at the 50 cm mark. Because of wear and tear, the center of mass may differ slightly from this point. One way to determine the location of the center of mass is to balance the bar by holding it at a single point from the bottom. The point where it balances is the center of mass.